What I Do
Robotics Research
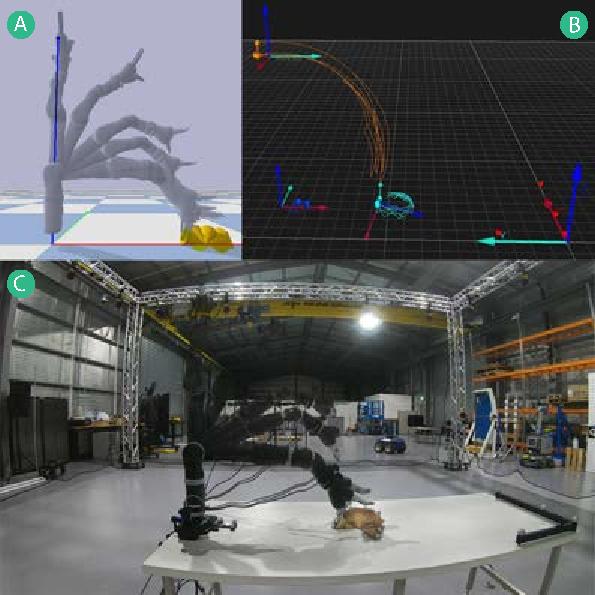
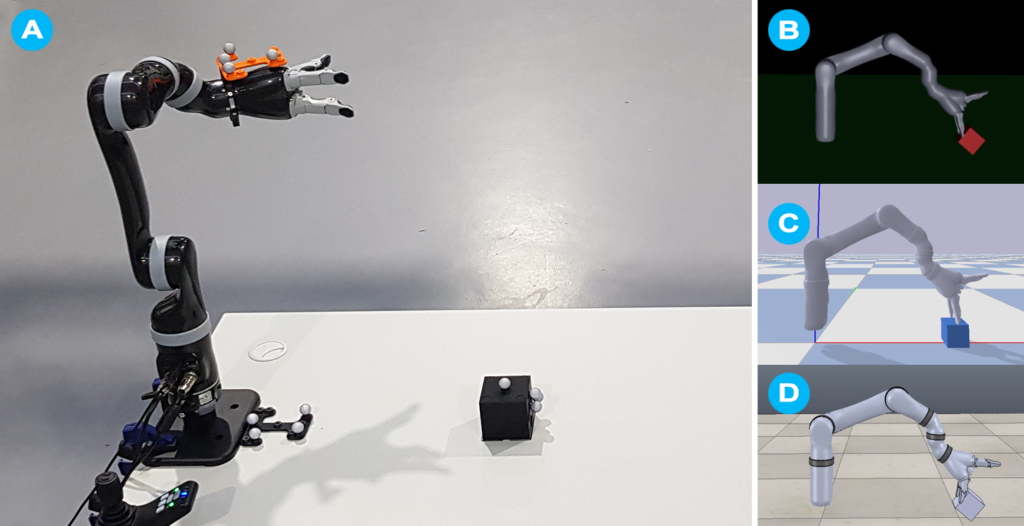
Conducting fundamental and applied research into the field of robotics with an emphasis on manipulation and an interest in bimanual and mobile manipulation. Experience in all aspects of research including academic writing, grant application, supervision and management.
ML Research
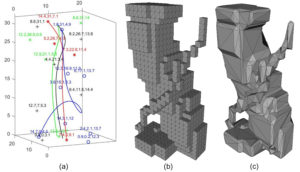
Understanding of machine learning fundamentals and recent advances of state of the art. Applied knowledge in geometric deep learning including graph neural networks and generative models with an interest in task planning and world models.
Tutoring
Experience lecturing and tutoring subjects taught as part of engineering, robotics and computer science bachelor or masters degrees. Subjects that have been taught are found throughout the continuum from first year subjects to final year specialisations.